Una prótesis robótica aprende a adaptarse a terrenos sin ajustes personalizados
Una prótesis robótica de rodilla y tobillo consiguió adaptarse en tiempo real a distintos terrenos, como caminar en llano, subir y bajar rampas o…
Una prótesis robótica de rodilla y tobillo consiguió adaptarse en tiempo real a distintos terrenos, como caminar en llano, subir y bajar rampas o enfrentar escaleras, sin recurrir a clasificadores de intención ni a ajustes específicos para cada persona usuaria, informó el Georgia Institute of Technology de Atlanta, en Estados Unidos.
Un reto para las prótesis motorizadas
El avance apunta a resolver uno de los principales desafíos de las prótesis robóticas de pierna: lograr que respondan con fluidez a los cambios del terreno sin requerir una programación compleja para cada modo de marcha ni una calibración individualizada para cada usuario.
De acuerdo con los investigadores de la Woodruff School of Mechanical Engineering y del Institute for Robotics and Intelligent Machines de Atlanta, las prótesis motorizadas convencionales suelen depender de controladores que exigen un ajuste manual amplio y de sistemas capaces de clasificar con antelación la intención de la persona usuaria, por ejemplo, si va a caminar en llano, subir una rampa o afrontar una escalera.
Pruebas con personas con amputación transfemoral
Para entrenar el sistema, el equipo empleó datos de marcha en varios terrenos tomados de 18 personas con amputación transfemoral, es decir, por encima de la rodilla. Después, el controlador se puso en funcionamiento en tiempo real sobre una prótesis robótica de rodilla y tobillo y se evaluó en cinco modos de locomoción: caminar en llano, subir rampas, bajar rampas, subir escaleras y bajar escaleras.
En las pruebas en tiempo real participaron cuatro personas: tres sin amputación y una con amputación transfemoral. Los resultados iniciales mostraron que el sistema fue capaz de modular la asistencia de la prótesis según el terreno y de generar transiciones en escaleras tanto cuando lideraba la pierna intacta como cuando lo hacía la protésica, pese a que los datos de entrenamiento solo incluían una de esas secuencias.
Control basado en inteligencia artificial
El estudio, titulado End-to-End Control of a Powered Knee-Ankle Prosthesis Towards Unified, Tuning-Free Assistance, plantea un sistema de control basado en inteligencia artificial para prótesis motorizadas de miembro inferior. En concreto, los autores probaron un controlador end-to-end, un modelo capaz de transformar directamente la información recogida por los sensores de la prótesis en señales de movimiento para sus motores.
El desarrollo estuvo a cargo de John Shim, Christoph Nuesslein, Sixu Zhou, Hanjun Kim, Kinsey Herrin y Aaron J. Young, investigadores vinculados al Georgia Institute of Technology.
Una línea de trabajo para mejorar la movilidad
Los especialistas consideran que estos resultados ofrecen una primera evidencia de que este tipo de control puede avanzar hacia una asistencia protésica más unificada y adaptable, sin necesidad de ajustes específicos para cada persona usuaria.
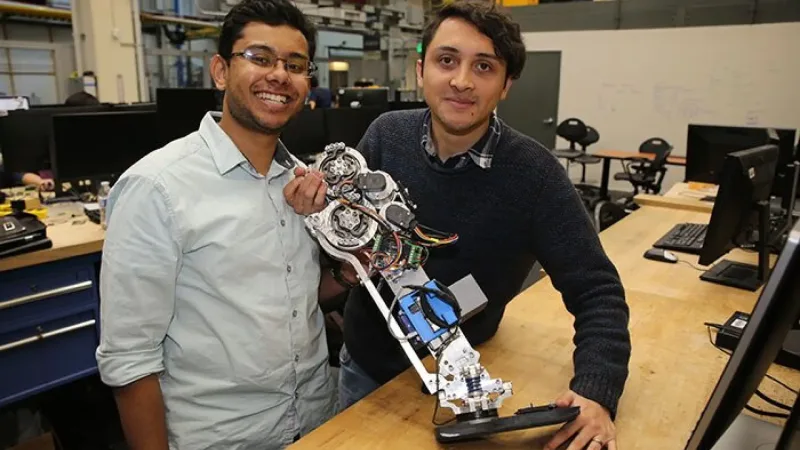
La línea de investigación forma parte del desarrollo de prótesis motorizadas de rodilla y tobillo orientadas a mejorar la movilidad de personas con amputación transfemoral. El laboratorio EPIC de Georgia Tech trabaja precisamente en una prótesis con dos motores, uno para la rodilla y otro para el tobillo, diseñada para asistir de forma independiente ambos movimientos y facilitar la marcha en distintos entornos, como suelo llano, rampas y escaleras.