Los ingenieros de Harvard desarrollaron un pequeño robot con pies pegajosos que puede subir, bajar y desplazarse en cualquier dirección en un espacio estrecho y complejo. El estudio publicado en la revista Science Robotics informó sobre un
Los ingenieros de Harvard desarrollaron un pequeño robot con pies pegajosos que puede subir, bajar y desplazarse en cualquier dirección en un espacio estrecho y complejo.
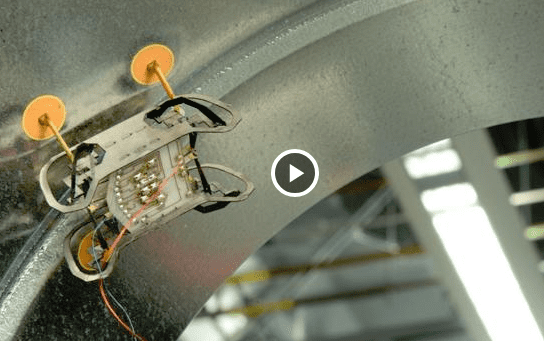
El estudio publicado en la revista Science Robotics informó sobre un micro-robot de 1.48 gramos con almohadillas electroadhesivas para los pies, articulaciones de origami en el tobillo y un modo de andar especialmente diseñado para caminar sobre superficies conductivas verticales y invertidas, como el interior. Las paredes de un motor a reacción comercial.
«Podrían algún día habilitar la inspección no invasiva de áreas de difícil acceso de máquinas grandes, ahorrando tiempo y dinero a las empresas y haciendo que esas máquinas sean más seguras», dijo el primer autor del estudio, Sebastien de Rivaz, ex investigador de Harvard que ahora trabaja en Apple.
Los investigadores equiparon la almohadilla del pie con un electrodo de cobre aislado con poliimida para generar fuerzas electrostáticas entre las almohadillas y la superficie conductora.
Las almohadillas para los pies se pueden soltar y volver a acoplar fácilmente activando y desactivando el campo eléctrico, que funciona a una tensión similar a la requerida para mover las piernas del robot, lo suficiente para evitar que el robot se deslice hacia abajo o caiga, de acuerdo con estudiar.
Además, las almohadillas son flexibles, lo que permite al robot trepar en superficies curvas o desiguales.
También crearon articulaciones de tobillo tipo origami que pueden rotar en tres dimensiones para compensar las rotaciones de sus piernas mientras camina, asegurando su orientación.
El robot tiene un patrón especial para caminar con tres almohadillas para los pies que siempre tocan la superficie durante el balanceo de la pierna.
Según el estudio, probado en superficies verticales e invertidas, pudo lograr más de 100 pasos seguidos sin desprenderse.
El robot también puede caminar alrededor de una sección curva e invertida en un motor a reacción. Un motor a reacción tiene aproximadamente 25,000 piezas individuales y no puede ser inspeccionado sin desarmar la máquina.
La investigación tiene como objetivo construir un ejército de robots capaces de escalar dentro de partes de motores a reacción que son inaccesibles para los trabajadores humanos.
Además, debido a que la capacidad de carga útil del robot es mayor que su propio peso, es posible llevar una fuente de alimentación, componentes electrónicos y sensores para inspeccionar sus entornos.
Es el «primer y más convincente paso» que muestra la posibilidad de un robot escalador de escala centimétrica y podría ser usado en el futuro para «explorar cualquier tipo de infraestructura, incluidos edificios, tuberías, motores, generadores», dijo el estudio correspondiente. autor Robert Wood en la Universidad de Harvard.